




引言
随着科技的不断发展,自动驾驶技术已经成为未来交通领域的重要研究方向。实时目标检测作为自动驾驶技术的重要组成部分,对于确保车辆在复杂环境中安全行驶至关重要。本文将探讨实时目标检测在自动驾驶中的应用案例,分析其技术原理和实际效果。
实时目标检测技术原理
实时目标检测技术是指能够在短时间内准确识别和定位图像或视频中目标的技术。其基本原理包括以下几个步骤:
图像预处理:对输入的图像进行灰度化、滤波等处理,以提高后续处理的效率。
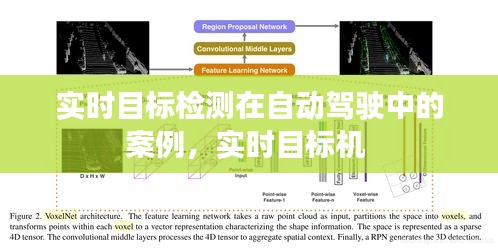
特征提取:通过卷积神经网络(CNN)等深度学习模型提取图像特征,为后续的目标检测提供基础。
目标检测:利用检测算法(如R-CNN、Faster R-CNN、YOLO等)对提取的特征进行分类和定位,识别图像中的目标。
后处理:对检测到的目标进行非极大值抑制(NMS)等后处理,以消除重复检测和噪声。
案例一:基于Faster R-CNN的自动驾驶车辆检测
在自动驾驶车辆检测中,Faster R-CNN因其速度快、精度高的特点而被广泛应用。以下是一个基于Faster R-CNN的自动驾驶车辆检测案例:
数据集:使用公开的车辆检测数据集,如COCO、Kitti等,对模型进行训练。
模型训练:利用GPU加速,对Faster R-CNN模型进行训练,优化网络参数。
模型部署:将训练好的模型部署到自动驾驶车辆中,实现实时车辆检测。
实际效果:在实际道路测试中,该模型能够准确识别和定位车辆,为自动驾驶系统提供可靠的数据支持。
案例二:基于YOLO的行人检测与避障
在自动驾驶过程中,行人检测与避障是确保安全行驶的关键。以下是一个基于YOLO的行人检测与避障案例:
数据集:使用行人检测数据集,如COCO、CARS等,对模型进行训练。
模型训练:利用GPU加速,对YOLO模型进行训练,优化网络参数。
模型部署:将训练好的模型部署到自动驾驶车辆中,实现实时行人检测与避障。
实际效果:在实际道路测试中,该模型能够准确识别和跟踪行人,为自动驾驶系统提供实时避障决策。
案例三:基于深度学习的交通标志识别
交通标志识别是自动驾驶系统中另一个重要的任务。以下是一个基于深度学习的交通标志识别案例:
数据集:使用交通标志数据集,如GTSRB、CULane等,对模型进行训练。
模型训练:利用GPU加速,对CNN模型进行训练,优化网络参数。
模型部署:将训练好的模型部署到自动驾驶车辆中,实现实时交通标志识别。
实际效果:在实际道路测试中,该模型能够准确识别交通标志,为自动驾驶系统提供实时交通信息。
结论
实时目标检测技术在自动驾驶领域具有广泛的应用前景。通过不断优化算法和模型,实时目标检测技术将为自动驾驶系统提供更加可靠的数据支持,提高自动驾驶车辆的安全性、稳定性和舒适性。未来,随着技术的不断进步,实时目标检测将在自动驾驶领域发挥更加重要的作用。
转载请注明来自江苏安盛达压力容器有限公司,本文标题:《实时目标检测在自动驾驶中的案例,实时目标机 》






 苏ICP备2020065159号-1
苏ICP备2020065159号-1